|
CAPÍTULO
III: FORMAS DE REALIDADE VIRTUAL IMERSIVAS
Os sistemas de RV diferem entre si levando em conta o nível de imersão
e de interatividade proporcionado ao participante. Ambos são determinados
de acordo com os tipos de dispositivos de entrada e saída de dados usados
no sistema de RV além da velocidade e potência do computador que
suporta o sistema de RV (JACOBSON, 1994). É claro que tudo vai depender
da finalidade do sistema.
Os dispositivos usados em RV são fortemente multisensoriais, usando
gráficos 3D, saídas de som especialmente distribuídas,
entrada de voz, movimento dos olhos, gestos e algum mecanismo que esteja ligado
com o sentido do tato ou força, e há também sensores responsáveis
pela última fronteira de interação. Como consequência,
a conexão entre o usuário e o ambiente virtual é geralmente
muito mais intensa que em outras aplicações convencionais.
De acordo com PIMENTEL e TEIXEIRA (1995) estes estilos de RV poderiam ser classificados
como: realidade virtual de simulação, realidade virtual de projeção,
augmented reality (realidade realçada), dispositivos físicos,
telepresença, visually coupled displays (displays visualmente casados),
realidade virtual de mesa, hipertexto (hypertexto), som 3D e ciborg.
3.1. RV
DE SIMULAÇÃO
A RV de Simulação representa o tipo mais antigo de sistema de
RV porque se originou com os simuladores de vôo desenvolvidos pelos militares
americanos depois da Segunda Guerra Mundial (JACOBSON, 1994).
Um sistema de RV de Simulação basicamente imita o interior de
um carro, avião ou jato, colocando o participante dentro de uma cabine
com controles. Dentro dessa cabine, telas de vídeo e monitores apresentam
um mundo virtual que reage aos comandos do usuário. Uma vez que o sistema
de RV de Simulação não processa imagens em estéreo,
as imagens aparecem de forma bastante rápida (JACOBSON, 1994). Em alguns
sistemas as cabines são montadas sobre plataformas móveis (PIMENTEL,
1995), além de dispor de controles com feedback tátil e auditivo
(JACOBSON, 1994).
|
As Figuras 12 e 13, demonstram Formas
de RV de Simulação.
|
|
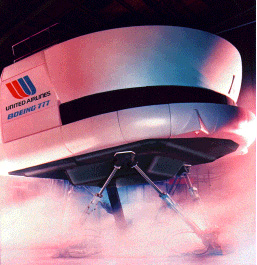
Fig. 12 - O simulador de vôo
da Boeing 777 considerado a mais sofisticada aplicação de
RV. O simulador possui plataforma móvel com 6FOV, sistema de som
3D e controles com feedback de força dentre outros recursos
|
Figura 13 - Simulador de cockpits
|
3.2.
REALIDADE VIRTUAL DE PROJEÇÃO
JACOBSON, em 1994, diz que a Realidade Artificial de Projeção,
foi criada na década de 70 por MYRON KRUEGER, caracterizando-a pelo usuário
estar fora do mundo virtual, mas que por outro lado, poderia se comunicar com
personagens ou objetos dentro dele.
KRUEGER, nesta mesma época, cria um Sistema de RV de Projeção,
ao qual denominou VIDEOPLACE (sala ou lugar de Projeção), que
capturava imagens de um ou mais usuários e projetava-as numa grande tela
que representava um mundo virtual, onde era possível à interação
destes usuários uns com os outros ou com objetos. O termo Realidade Virtual,
criado por KRUEGER, fora simplesmente para descrever o tipo de ambiente criado
pelo seu sistema, que poderia ser utilizado sem a necessidade do participante
utilizando dispositivos de entrada de dados, afirma JACOBSON.
|
As Figuras 12 e 13, demonstram Formas
de RV de Projeção.
|
 |
 |
|
Figura 14 - Trator Virtual baseado
em Projeção de Tela
|
Figura 15 - Visor baseado em Projeção
de Tela
|
3.3.
AUGMENTED REALITY (REALIDADE REALÇADA)
A Augmented Reality utiliza dispositivos visuais transparentes presos à
cabeça nos quais os dados são projetados. Pelo fato desses displays
serem transparentes, o usuário pode ver dados, diagramas, animações
e gráficos 3D sem deixar de enxergar o mundo real, tendo informações
sobrepostas ao mundo real. Estes displays transparentes são chamados
Heads Up Displays (HUDs) por perm
itirem essa visão através das informações geradas
pelo computador. O usuário pode, por exemplo, estar consertando algo
e visualizando nos óculos os dados necessários a esta operação
(PIMENTEL e TEIXEIRA, 1995).
|
Figuras 16 e 17 - Exemplificando Formas
de RV Realçada
|
Quanto ao Sistema de Realidade Aumentada (Figura 18), é uma combinação
da visão do ambiente real com o ambiente virtual (Figura 8 ). Esse tipo
de sistema é obtido mesclando-se sistemas de telepresença (Figura
7) e RV.
|
|
|
Figura 18 - Sistema de Realidade Realçada
|
3.4.
DISPOSITIVOS FÍSICOS
Os dispositivos físicos procuram estimular as sensações
físicas, como o tato, tensão muscular e temperatura (GRADECKI,
1994). Diferente dos dispositivos de saída de visão e audição,
os dispositivos físicos requerem uma sofisticada interação
eletromecânica com o corpo do usuário. A tecnologia existente atualmente,
não é capaz de estimular os sentidos físicos com o nível
de realismo que atinge os sentidos visuais e auditivos: o problema está
além da criação de dispositivos de feedback, pois envolve
também a compreensão e simulação das forças
apropriadas (PIMENTEL, 1995).
3.4.1.
Feedback Tátil
Feedback tátil é o nome dado a sistemas que transmitem sensações
que atuam sobre a pele. O feedback tátil (Figura 19) deve fornecer não
apenas a sensação do toque mas também permitir ao usuário
perceber se está tocando uma superfície lisa ou rugosa (GRADECKI,
1994). Existem atualmente duas diferentes formas de fazer essa simulação
tátil: através de pressão de ar e através de vibrações
(PIMENTEL, 1995).
 |
|
Figura 19 - Esquema de uma luva de
dados
baseada em sensores de fibra ótica
|
3.4.2.
Feedback de Força
Sistemas que permitem as sensações de pressão ou peso
oferecem feedback de força. Uma maneira de construção de
um sistema de feedback de força seria através de uma espécie
de exoesqueleto mecânico que se encaixa no corpo do usuário, fazendo
com que determinados movimentos possam permitir-lhe sentir o peso ou a resistência
do material de um objeto no mundo virtual (GRADECKI, 1994).
Alguns sistemas transmitem feedback de força apenas para as mãos
e braços (Figura 20). Através do uso de pistões, por exemplo,
é possível controlar a quantidade de resistência do braço
e/ou da mão do usuário. No entanto, este tipo de sistema limita
a faixa de possíveis situações de feedback, além
de ser demasiadamente caro (GRADECKI, 1994).
Figura 20 - Exemplo de sistema de feedback de força para mão
e braço. O usuário pode "sentir" o peso e o cabo do
martelo, enquanto um braço mecânico executa a mesma ação
com o martelo real.
 |
|
Figura 20 - Exemplo de sistema de feedback
de força para mão e braço. O usuário pode
"sentir" o peso e o cabo do martelo, enquanto um braço
mecânico executa a mesma ação com o martelo real.
|
3.4.3.
Feedback Térmico
Um tipo de feedback que também pode ser fornecido por um sistema de
RV é o feedback térmico. Este feedback poderia ser fornecido,
por exemplo, quando o usuário se aproximasse de uma fogueira no mundo
virtual (GRADECKI, 1994).
O feedback térmico não é muito utilizado em sistemas
de RV devido ao seu alto custo, mas já existem algumas pesquisas neste
campo sendo desenvolvidas. Uma dessas pesquisas fez uma empresa do Texas desenvolver
um sistema que aquece parte do corpo através de um pequeno dispositivo
que reúne um aquecedor, um sensor de temperatura e um inversor de calor
(GRADECKI, 1994).
3.5.
TELEPRESENÇA
Enquanto a Telepresença faz com que a interface atue sobre o telerobô
que vai agir sobre o mundo real, o sistema de RV faz com que a interface opere
diretamente sobre o computador, que vai interagir sobre um mundo virtual ou
um mundo real simulado. Em telepresença e em outros casos, onde possa
haver dificuldades de transferência ou tratamento em tempo real de imagens
reais complexas, a substituição do mundo real por um mundo virtual
equivalente pode resolver o problema, na medida em que as imagens podem ser
geradas localmente. As transferências de informações podem
ser reduzidas a dados de posicionamento.
Por sua vez, o propósito fundamental de um sistema de Telepresença,
é estender as capacidades motoras e sensoriais de um operador, para um
ambiente remoto, para que tarefas complexas possam ser realizadas. O operador
usa dispositivos de rastreamento que detectam seus movimentos e enviam estas
informações ao telerobô, que, por sua vez, repete as ações
do operador no ambiente remoto. Tais dispositivos, mais comuns para Telepresença
são: capacete de RV, que produz uma visão estereoscópica
do ambiente dando a sensação de imersão; sistema de som
tridimensional e luvas ou dispositivos que possibilitam ao usuário manipular
objetos.
Este tipo de RV utiliza câmeras de vídeo e microfones remotos para
criar a imersão e a projeção do usuário profundamente
no mundo virtual. Controle de robôs e exploração planetária
são exemplos de pesquisas em desenvolvimento. No entanto, existe um grande
campo de pesquisa no uso de telepresença em aplicações
médicas. Em intervenções cirúrgicas, médicos
já utilizam camêras de vídeo e cabos de fibra óptica
para visualizar os corpos de seus pacientes. Através da RV eles podem
literalmente "entrar" no paciente indo direto ao ponto de interesse
e/ou vistoriar a operação feita por outros (PIMENTEL e TEIXEIRA,
1995).
Formas de RV em Telepresença, é representada pelas figuras 21
e 22.
 |
 |
|
Figura 21 - Protótipo de um
telerobô utilizado em explorações espaciais
|
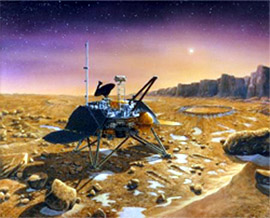
Figura 22 - Telerobô "Pathfinder"
da NASA criado para explorar Marte em 1999
|
3.6.
VISUALLY COUPLED DISPLAYS ("DISPLAYS VISUALMENTE CASADOS")
Esta é a classe de sistemas geralmente mais associada à RV. Nos
sistemas desta classe as imagens são exibidas diretamente ao usuário,
sendo que o usuário está olhando em um dispositivo que deve acompanhar
os movimentos de sua cabeça. Este dispositivo geralmente permite imagens
e sons em estéreo, além de conter sensores especiais ligados a
ele que detectam a movimentação da cabeça do usuário,
usando esta informação para realimentação da imagem
exibida (PIMENTEL e TEIXEIRA, 1995).
Desta forma, "Displays Visualmente Casados" são formas de
RV que podem ser representados por dispositivos HMD's AMD's, BOOM e outros.
 |
 |
|
Figura 23 - BOOM
|
Figura 24 - HMD
|
3.7.
REALIDADE VIRTUAL DE MESA (DESKTOP VR)
PIMENTEL e TEIXEIRA (1995) vêem a RV de Mesa como um subconjunto dos
sistemas tradicionais de RV. Ao invés do uso de "Head Mounted Displays"
(HMD's), são utilizados grandes monitores ou algum sistema de projeção
para apresentação do mundo virtual. Alguns sistemas permitem ao
usuário ver imagens 3D no monitor através do uso de óculos
obturadores, polarizadores ou com filtros coloridos.
 |
| Figura 25 - Sistema de RV de Mesa |
3.8.
HIPERTEXTO (HYPERTEXT)
Para PIERRE LEVY, 1996, foi através do suporte digital, que surgiram
novos tipos de leituras (e escritas) coletivas, que continuamente, desenrolasse
entre a leitura individual de um texto preciso e a navegação em
várias redes digitais no interior das quais, um grande número
de pessoas anota, aumenta, conecta os textos uns aos outros por meio de ligações
hipertextuais:
"(...) Um pensamento se atualiza num texto e um texto numa leitura (interpretação).
Ao remontar essa encosta da atualização, a passagem ao hipertexto
é uma virtualização. Não para retornar ao pensamento
do autor, mas para fazer do texto atual uma das figuras possíveis de
um campo textual disponível, móvel, reconfigurável à
vontade, e até para conectá-lo e fazê-lo encontrar em composição
com outros corpos hipertextuais e diversos instrumentos de auxílio à
interpretação". Pierre Levy, "Qu'est-Ce Que Le Virtuel?",
(1996, p. 43).
Hipertexto é um texto aberto à múltiplas conexões
a outros hipertextos (Figura 26).
Com os hipertextos, é a figura do leitor que se vê substituída
pela do "netsurfista". Esse não é mais um simples leitor,
mas um autor e um agente de interação com as interfaces do ciberespaço,
afirma LAUREL. O ciberespaço é assim um conjunto de hipertextos
interligados entre si, onde podemos adicionar, remover e modificar partes do
texto.
Entretanto, a idéia de hipertexto não é exclusividade
do ciberespaço, pois o texto e o leitor se engajam num processo também
hipermediático, visto que a leitura dar-se por interconexões à
memória do leitor, às referencias do texto, aos índices
e ao índex que remetem o leitor para fora da linearidade do texto. Portanto,
todo texto escrito é um hipertexto, onde o sentido da "interatividade"
se situa entre a memória subjetiva do leitor e a interatividade em relação
ao objeto livro. Assim, todo texto escrito é um hipertexto onde o motor
da "interatividade" se situa entre a memória subjetiva do leitor
e a interatividade em relação ao objeto livro. Toda leitura exige
um estado de atenção, de lapsos e de correlações
similares ao surfar no Web.
Desta forma, a diferença entre um "hipertexto livro" e um
"hipertexto ciberespaço", está na conexão em
tempo real, imediata, "livre", na qual situa o ciberespaço.
Ele nos permite passar de uma referência a outra, sendo a conexão
imediatamente disponível. Essa conexão em relação
ao livro obriga a vinculação também do corpo, além
da memória e da subjetividade. O leitor deve buscar a referência,
procurar numa biblioteca, subir nas estantes e achar a correlação
procurada, saindo fisicamente de perto do livro em questão, para interagir
com um outro.
No ciberespaço isso não acontece pois passamos de referências
a referências, de servidor a servidor, de país em país com
um simples clicar do "mouse", sem saber onde começa e onde
termina o processo. Como afirmava MCLUHAN, (1967) GUTENBERG, (1455-1500) nos
fez leitores, a máquina Xerox nos fez editores e a eletrônica e
os computadores em rede nos faz autores. Nesse hipertexto planetário
que é o ciberespaço, "todo o mundo pode ser um autor, no
entanto, não há meios de se certificá-lo é um autor:
a distinção em qual isto resto, a diferença do autor para
o leitor desaparece. Parando diante de um imóvel que pertenceu a nossa
infância, sentirmos os cheiros e ruídos que só a nós
faz sentido, ou clicar num "link" que a você parece naquele
instante interessante, nos parece parte de um mesmo processo hipertextual (formas
de leitura e escrita próprias da vida cotidiana). É importante
pensarmos que tanto a ação de interagir com os hipertextos eletrônicos
como a simples circulação banal do flâneur pela cidade são,
mais do que simples formas de passivamente absorvermos informações,
presos nas malhas da infra-estrutura tecnocrática (os equipamentos da
cidade, a tecno-ciência por trás dos softwares), elas são
na verdade suportes de apropriações e invenções
diárias. Para além de todos os determinismos tecnocráticos,
alguma brecha encontramos para construir caminhos próprios. Tanto na
flânerie pelos espaços urbanos como na nossa "navegação"
hipertextual eletrônica, mais banal estaríamos, certamente, imprimindo
traços, deixando marcas, gravando a dimensão do cotidiano com
nossas idiossincrasias.
 |
|
Figura 26 - Hipertexto
|
3.9.
SOM 3D
Numa simulação de condução, ou em qualquer outro
ambiente de RV, a síntese de Som 3D permite aumentar de forma substancial
a percepção que o usuário tem do ambiente que o envolve,
bem como a sensação de imersão nesse mesmo ambiente.
Segundo JACOBSON, (1994), as gravações de som tridimensional baseiam-se
em um processo de manipulação auditiva que permite que o artista
ou o engenheiro de gravação "posicione" os sons no espaço,
controlando sua direção, distância e profundidade.
Neste contexto, foi desenvolvido um sistema de síntese de Som 3D que
se pode integrar facilmente em diversas plataformas. O sistema possui largo
campo de aplicações, quer através da sua integração
com plataformas de simulação de condução, quer noutras
aplicações na área da RV e Telepresença que poderão
vir a ser desenvolvidas futuramente.
Este sistema de Som 3D foi aplicado a um simulador de condução
automóvel (DRIS) desenvolvido a partir da plataforma de simulação
genérica. Os resultados obtidos demonstram o indiscutível incremento
da capacidade de imersão na simulação. Verificou-se que,
mesmo a síntese de sons simples, como o do motor do automóvel
de simulação, origina melhorias consideráveis nessa capacidade.
Dado que apenas é possível instalar duas placas de som por computador,
a especialização sonora do sistema está limitada à
utilização de quatro canais. A utilização simultânea
da aplicação de síntese de Som 3D em diversos computadores
permite obviar solucionar este problema, sendo necessário desenvolver
algum trabalho a nível da sua sincronização. Uma vez que
o controle do hardware de síntese de som é realizado através
da Linguagem MIDI, outra solução possível seria a utilização
de sintetizadores adicionais ligados ao interface MIDI das placas de som.
3.10.
CIBORG
Em torno de uma década atrás, DONNA HARAWAY (1991) publicou um
artigo entitulado "A Cyborg Manifesto: Science, Technology, and Socialist-Feminism
in the Late Twentieth Century."
Era uma composição feminista social que usou o conceito de ciborg
em um teoricamente modo de percepção. Seu artigo é entendido
como um conceito acentuado para o uso metafórico da noção
de Ciborg. Ele retornará o conceito de "ciborg" para seu contexto
original científico e desenvolverá um modelo de natureza do processo
do ciborg de um ponto de vista estruturalmente biogenético. Isto permitirá
a nós um melhor entendimento de desenvolvimentos futuros no prosseguimento
da evolução da consciência do ciborg.
O conceito de ciborg emergiu fora do campo da Cibernética (estudo do
controle e das propriedades reguladoras de sistemas complexos, que primeiramente
fora definido por NORBERT WIENER em 1948). A perna de madeira e o gancho como
dispositivos protéticos, representam as inovações mais
primitivas que conduzem ao processo de transformação de ciborg.
Entretanto, hoje entende-se por Ciborg, como uma criatura composta de algumas
partes construídas sem o benefício da mente. Além disso,
as partes devem ser de grandeza maior que a dimensão molecular. Uma criatura
com aspirina em seu corpo não é um ciborg. Uma criatura com um
coração artificial é um ciborg. Em cima desta definição,
animais com corações doados, rins ou retinas também devem
ser ciborgs.
Segundo WIENER, estava desde o princípio claro que cibernéticos
aplicavam-se igualmente a máquinas e sistemas viventes. Embora ele tenha
endereçado as implicações sociais de cibernéticos
em seus primeiros trabalhos, ele não discutiu a fusão física
atual de máquinas e organismos. Isto tomou outra década antes
de dois cientistas da NASA, chamados MANFRED CLYNES e NATHAN KLINE (1960) cunharem
o termo "ciborg" e sugerirem algumas das vantagens para viagem espacial
de alteração do corpo humano em máquinas.
Atualmente, para desdobrar o que desenvolve-se de tecnologias cibernéticas
para controlar o mundo, como exemplo, sistemas computacionais para controlar
usinas de energia, sistemas de apoio de vida para nos conduzir à lua
ou para explorar o fundo dos oceanos, etc.., também se produz tecnologias
para controlar o ser físico e mental, por exemplo, sensores eletrônicos,
marca-passos, próteses, etc..
Considerando que a revolução industrial substituiu o humano com
tecnologias, isto é, músculo e osso substituídos por máquinas,
e a revolução cibernética substituiu os controladores humanos
com tecnologias, ou seja, cérebros substituídos por computadores;
uma "casa inteligente" substitui uma tradicional "dona de casa"
ou "guardiã de casa", não é tão simples
ver que os mesmos processos penetram reciprocamente no corpo e consciência,
por exemplo, servo-motores, torneiras bioquímicas, membros artificiais,
caixas de voz e sensações, e eventualmente "microchips"
no cérebro; que fixaram o ciborg como uma conseqüência inevitável
da técnica humana. Portanto, o ciborg resulta em uma transformação
inevitável do próprio corpo humano, e consequentemente a organização
interna da consciência do corpo.
Eventualmente, para ganhar acesso a um alcance mais largo de experiências
que os limites proveram para o corpo natural, podemos ter que alterar o sistema
nervoso tecnicamente. De certo modo, os sistemas endogênicos vêm
reproduzir os exógenos, padrões tecnologicamente alterados no
mundo. A humanidade caminha indissoluvelmente ao desenvolvimento de uma interface
de cérebro-máquina direta, no qual ambos eliminarão a necessidade
de interação comportamental-sensorial, com máquinas que
dissolverão a distinção fenomelógica até
mesmo entre corpo e máquina.
As figuras 27. e 28. demonstram como representa-se a forma de RV nos Ciborgs.
|
Figuras 27 e 28 - Ciborgs
|
|