O AMBIENTE SUBMARINO
O sonar ativo funciona basicamente como
o radar, só que usa pulsos sonoros ao invés de ondas de rádio.
As ondas de rádio não se propagam sob a água, além
de poucos metros.
Os pulsos do sonar (o conhecido "ping"),
é emitido e ao encontrar um obstáculo, retorna ao emissor.
Medindo-se o tempo que o "ping" levou para ir e voltar, tem-se como calcular
a distância do objeto ecoado com "relativa" precisão. A precisão
é "relativa" porque os pulsos do sonar sofrem diversos tipos de
atenuação causados pela temperatura, salinidade e pressão
da água, que mudam de acordo com as estações do ano,
posições geográficas e condições atmosféricas.
Um fenômeno muito conhecido que prejudica
os sonares ativos são as camadas termais ou isotérmicas,
que desviam as ondas dos sonares, para cima e/ou para baixo, criando zonas
de "sombra", onde os submarinos podem se ocultar. (Figura1).
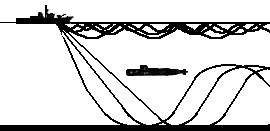
Figura 1
Notar que na situação apresentada, parte do feixe que parte do sonar do navio, se propaga próximo da superfície e parte dele se desvia para baixo, voltando para cima logo adiante, mas deixando uma zona de "sombra", onde o submarino se oculta. Notar que nessas condições, o submarino sabe da presença do navio de superfície, porque usa o sonar passivo, que usa hidrofones só para escuta.
Camadas Termais
Essas camadas são partes de água
de temperatura diferente, que provocam uma redução brusca
na velocidade do som, desviando parte do feixe para baixo e criando "dutos",
onde o som se propaga com certa uniformidade. (figura2 ).

Figura 2: O Raio Limite e a Zona
de Sombra
Observar o duto de superfície e
a zona de sombra (shadow zone), a área que deixa de ser coberta
pelo sonar, devido ao desvio do feixe.
Como o mar é um ambiente dinâmico,
principalmente com os navios em movimento, as camadas podem mudar de profundidade
sem aviso prévio, alterando a curva de desempenho do sonar que foi
feita anteriormente. Essas curvas de desempenho são geradas com
dados obtidos no lançamento de sondas, que vão mergulhando
e transferindo para o navio ou helicóptero, onde estão as
camadas naquele momento, a pressão da água, salinidade etc.
Porisso essas sondas têm que ser
lançadas periodicamente.
Como pudemos ver nos gráficos, o som não se propaga no meio líquido com a mesma velocidade em todas as direções. A propagação anômala do som na água faz com que o sinal sonoro emitido pelo sonar ativo e o ruído produzido por um submarino submerso sejam desviados em suas trajetórias. Normalmente em áreas marítimas de grande profundidade, a salinidade não varia muito, mas a pressão da água sim, aumentando com a profundidade. A temperatura se altera também, segundo um padrão mais variável. Em geral, esta é mais ou menos constante (embora sujeita a variações sazonais) até 200 ou 300m de profundidade, seguindo-se uma queda de temperatura até cerca de 1.200m (denominada "termoclinal permanente"), e novamente temperatura constante até o fundo.
A velocidade do som é praticamente constante próximo à superfície e aí os feixes sonoros não são desviados. Mais abaixo, porém, a velocidade do som diminui com a profundidade, fazendo com que os feixes sonoros sejam desviados para baixo. Finalmente, a velocidade começa a aumentar de novo com o aumento de pressão (o que aumenta a densidade da água), fazendo com que os feixes sonoros sejam desviados para cima de novo.
Podemos ver então que existe um
"duto de superfície", no qual o som se propaga a grandes distâncias
razoavelmente bem, até se dissipar por completo.
Abaixo da "camada termal", o alcance do
sonar é reduzido pelo desvio dos feixes sonoros para baixo, tornando
necessário o uso do sonar de profundidade variável (VDS),
para compensar a perda de alcance do sonar de casco (figura 3).

Figura 3. Efeito dos sonares de
profundidade variável(VDS).
Mesmo assim, o alcance do sonar passivo de um submarino é o dobro do alcance do sonar ativo de um navio de superfície.
Vimos que abaixo da "camada termal" o alcance
do sonar é reduzido por causa do desvio dos feixes sonoros para
baixo, devido à diminuição da velocidade do som. A
profundidade de velocidade mínima do som é conhecida como
"canal de profundidade", no qual o som é focalizado e tende a voltar
à superfície a grandes distâncias — permitindo
a detecção de alvos na primeira ou na segunda "zonas de convergência"
(de 30 e a 80 mil jardas de distância - ver gráficofigura
4).

Figura 4. Zona de Convergência.
O fenômeno das "zonas de convergência" descrito acima, está sujeito a certas condições climáticas sazonais ou geográficas, em áreas de grande profundidade.
Sonares do tipo AN/SQS-26 que equipam os contratorpedeiros classe "Pará" têm alcance de zona de convergência e capacidade de reflexão de fundo.
Naturalmente, as condições operativas do Báltico ou do Mediterrâneo não são as mesmas do Atlântico Sul. Além disso, os ecos de retorno ou os ruídos produzidos pelo alvo sofrem interferências de origem humana (passagem de navios, explosão de armas submarinas ou métodos de despistamento) ou ambiental (relevo do fundo, vegetação marinha ou cardumes de peixes).
Em termos de alcance, os submarinos conseguem
detectar navios de superfície a partir de 100 mil jardas (53 milhas)
de distância, enquanto o alcance do sonar ativo dos navios chega
ao máximo de 25 milhas em condições ideais (excetuando-se
as situações de "zona de convergência"). Os sonares
ativos de helicópteros têm alcance de 16 mil jardas a 25 mil.
A propósito, cada jarda vale 0,91m.
Volta
Índice